
|
Graph Data Structures and Algorithms |  |
Classes | |
| class | AdjacencyListGraph |
| undirected adjacency list graph in the LEMON API More... | |
| class | BinaryForest |
| BinaryForest stores a collection of rooted binary trees. More... | |
| class | ClusteringOptions |
| Options object for hierarchical clustering. More... | |
| class | GridGraph< N, DirectedTag > |
| Define a grid graph in arbitrary dimensions. More... | |
| class | ShortestPathDijkstra< GRAPH, WEIGHT_TYPE > |
| shortest path computer More... | |
Functions | |
| Arc | addArc (Node const &u, Node const &v) |
Add a new arc from node u to node v. The arc ID is 2*id(u) if v is the left child of u, 2*id(u)+1 otherwise. | |
| Node | addNode () |
| Add a new node (its node ID will be selected automatically). | |
| Arc | arcFromId (index_type const &id) const |
| Get arc descriptor for id. | |
| BinaryForest () | |
| Create an empty forest. | |
| template<class GRAPH , class EDGE_WEIGHTS , class SEEDS , class LABELS > | |
| void | carvingSegmentation (const GRAPH &g, const EDGE_WEIGHTS &edgeWeights, const SEEDS &seeds, const typename LABELS::Value backgroundLabel, const typename EDGE_WEIGHTS::Value backgroundBias, const typename EDGE_WEIGHTS::Value noPriorBelow, LABELS &labels) |
| edge weighted watersheds Segmentataion More... | |
| template<class G , class A , class B > | |
| void | copyEdgeMap (const G &g, const A &a, B &b) |
| copy a lemon edge map | |
| template<class G , class A , class B > | |
| void | copyNodeMap (const G &g, const A &a, B &b) |
| copy a lemon node map | |
| template<class GRAPH , class WEIGHTS , class COMPERATOR > | |
| void | edgeSort (const GRAPH &g, const WEIGHTS &weights, const COMPERATOR &comperator, std::vector< typename GRAPH::Edge > &sortedEdges) |
| get a vector of Edge descriptors More... | |
| template<class GRAPH , class EDGE_WEIGHTS , class SEEDS , class LABELS > | |
| void | edgeWeightedWatershedsSegmentation (const GRAPH &g, const EDGE_WEIGHTS &edgeWeights, const SEEDS &seeds, LABELS &labels) |
| edge weighted watersheds Segmentataion More... | |
| template<unsigned int N, class DirectedTag , class T , class EDGEMAP > | |
| void | edgeWeightsFromInterpolatedImage (const GridGraph< N, DirectedTag > &g, const MultiArrayView< N, T > &interpolatedImage, EDGEMAP &edgeWeights, bool euclidean=false) |
| create edge weights from an interpolated image More... | |
| template<unsigned int N, class DirectedTag , class NODEMAP , class EDGEMAP , class FUNCTOR > | |
| void | edgeWeightsFromNodeWeights (const GridGraph< N, DirectedTag > &g, const NODEMAP &nodeWeights, EDGEMAP &edgeWeights, bool euclidean, FUNCTOR const &func) |
| create edge weights from node weights More... | |
| template<class GRAPH , class EDGE_WEIGHTS , class NODE_SIZE , class NODE_LABEL_MAP > | |
| void | felzenszwalbSegmentation (const GRAPH &graph, const EDGE_WEIGHTS &edgeWeights, const NODE_SIZE &nodeSizes, float k, NODE_LABEL_MAP &nodeLabeling, const int nodeNumStopCond=-1) |
| edge weighted watersheds Segmentataion More... | |
| template<class G , class A , class T > | |
| void | fillEdgeMap (const G &g, A &a, const T &value) |
| fill a lemon edge map | |
| template<class G , class A , class T > | |
| void | fillNodeMap (const G &g, A &a, const T &value) |
| fill a lemon node map | |
| Node | getChild (Node const &node, size_t i=0) const |
Get child number i of node. Returns the left child if i=0, the right child if i=1, and lemon::INVALID for other values of i or when the respective is undefined. | |
| Node | getNode (size_t i) const |
Create node cescriptor for ID i, or lemon::INVALID if i is not a valid ID. | |
| Node | getParent (Node const &node, size_t i=0) const |
Get the parent node descriptor of node, or lemon::INVALID if node is a root or i is non-zero. | |
| Node | getRoot (size_t i=0) const |
Get the root node descriptor of tree i in the forest, or lemon::INVALID if i is invalid. | |
| template<class GRAPH , class NODE_FEATURES_IN , class EDGE_INDICATOR , class NODE_FEATURES_OUT > | |
| void | graphSmoothing (const GRAPH &g, const NODE_FEATURES_IN &nodeFeaturesIn, const EDGE_INDICATOR &edgeIndicator, const float lambda, const float edgeThreshold, const float scale, NODE_FEATURES_OUT &nodeFeaturesOut) |
| smooth node features of a graph More... | |
| template<... > | |
| void | hierarchicalClustering (...) |
| Reduce the number of nodes in a graph by iteratively contracting the cheapest edge. More... | |
| index_type | id (Node const &node) const |
| Get ID for node descriptor node. | |
| index_type | id (Arc const &arc) const |
| Get ID for arc descriptor arc. | |
| size_t | inDegree (Node const &node) const |
Return the number of incoming edges of node. 0 for a root node, 1 otherwise. | |
| template<class GRAPH_IN , class GRAPH_IN_NODE_LABEL_MAP > | |
| void | makeRegionAdjacencyGraph (GRAPH_IN graphIn, GRAPH_IN_NODE_LABEL_MAP labels, AdjacencyListGraph &rag, typename AdjacencyListGraph::template EdgeMap< std::vector< typename GRAPH_IN::Edge > > &affiliatedEdges, const Int64 ignoreLabel=-1) |
| make a region adjacency graph from a graph and labels w.r.t. that graph More... | |
| index_type | maxArcId () const |
Return the highest possible arc ID (equivalent to 2*maxNodeId() + 1). | |
| index_type | maxNodeId () const |
| Return the highest existing node ID. | |
| size_t | merge (BinaryForest const &other) |
| Merge two forests and increase the IDs of other to avoid ID clashes. The function returns the offset that has been added to these IDs. | |
| Node | nodeFromId (index_type const &id) const |
| Get node descriptor for id. | |
| size_t | numArcs () const |
Return the number of arcs. Always less than maxArcId() because not all arcs actually exist. | |
| size_t | numChildren (Node const &node) const |
Return the number of children of node (equivalent to outDegree()). | |
| size_t | numNodes () const |
Return the number of nodes (equivalent to maxNodeId()+1). | |
| size_t | numParents (Node const &node) const |
Return the number of parents of node (equivalent to inDegree()). | |
| size_t | numRoots () const |
| Return the number of trees in the forest. | |
| size_t | outDegree (Node const &node) const |
Return the number of outgoing edges of node. 0 for a leaf node, 1 or 2 otherwise. | |
| template<class NODE , class PREDECESSORS > | |
| size_t | pathLength (const NODE source, const NODE target, const PREDECESSORS &predecessors) |
| get the length in node units of a path | |
| template<class RAG , class BASE_GRAPH , class BASE_GRAPH_RAG_LABELS , class BASE_GRAPH_GT , class RAG_GT , class RAG_GT_QT > | |
| void | projectGroundTruth (const RAG &rag, const BASE_GRAPH &baseGraph, const BASE_GRAPH_RAG_LABELS &baseGraphRagLabels, const BASE_GRAPH_GT &baseGraphGt, RAG_GT &ragGt, RAG_GT_QT &) |
| template<class RAGGRAPH , class GRAPH , class RAGEDGES , unsigned int N, class T > | |
| MultiArray< 2, MultiArrayIndex > | ragFindEdges (const RAGGRAPH &rag, const GRAPH &graph, const RAGEDGES &affiliatedEdges, MultiArrayView< N, T > labelsArray, const typename RAGGRAPH::Node &node) |
| Find indices of points on the edges. More... | |
| template<class GRAPH , class NODE_FEATURES_IN , class EDGE_INDICATOR , class NODE_FEATURES_OUT > | |
| void | recursiveGraphSmoothing (const GRAPH &g, const NODE_FEATURES_IN &nodeFeaturesIn, const EDGE_INDICATOR &edgeIndicator, const float lambda, const float edgeThreshold, const float scale, size_t iterations, NODE_FEATURES_OUT &nodeFeaturesBuffer, NODE_FEATURES_OUT &nodeFeaturesOut) |
| smooth node features of a graph More... | |
| template<class GRAPH , class WEIGHTS , class PREDECESSORS , class DISTANCE , class HEURSTIC > | |
| void | shortestPathAStar (const GRAPH &graph, const typename GRAPH::Node &source, const typename GRAPH::Node &target, const WEIGHTS &weights, PREDECESSORS &predecessors, DISTANCE &distance, const HEURSTIC &heuristic) |
| Astar Shortest path search. | |
| Node | source (Arc const &arc) const |
| Find start node of arc. | |
| Node | target (Arc const &arc) const |
| Find end node of arc. | |
| bool | valid (Node const &node) const |
| Check if node exists. | |
| bool | valid (Arc const &arc) const |
| Check if arc exists. | |
Detailed Description
Graph algorithms and the underlying graph data structures (e.g. GridGraph and AdjacencyListGraph) implementing the APIs of the boost::graph and LEMON libraries.
See also the GridGraph additions to namespace boost.
Function Documentation
| void vigra::edgeSort | ( | const GRAPH & | g, |
| const WEIGHTS & | weights, | ||
| const COMPERATOR & | comperator, | ||
| std::vector< typename GRAPH::Edge > & | sortedEdges | ||
| ) |
get a vector of Edge descriptors
Sort the Edge descriptors given weights and a comperator
| void vigra::makeRegionAdjacencyGraph | ( | GRAPH_IN | graphIn, |
| GRAPH_IN_NODE_LABEL_MAP | labels, | ||
| AdjacencyListGraph & | rag, | ||
| typename AdjacencyListGraph::template EdgeMap< std::vector< typename GRAPH_IN::Edge > > & | affiliatedEdges, | ||
| const Int64 | ignoreLabel = -1 |
||
| ) |
make a region adjacency graph from a graph and labels w.r.t. that graph
- Parameters
-
graphIn : input graph labels : labels w.r.t. graphIn [out] rag : region adjacency graph [out] affiliatedEdges : a vector of edges of graphIn for each edge in rag ignoreLabel : optional label to ignore (default: -1 means no label will be ignored)
- Examples:
- graph_agglomerative_clustering.cxx.
| void vigra::edgeWeightedWatershedsSegmentation | ( | const GRAPH & | g, |
| const EDGE_WEIGHTS & | edgeWeights, | ||
| const SEEDS & | seeds, | ||
| LABELS & | labels | ||
| ) |
edge weighted watersheds Segmentataion
- Parameters
-
g input graph edgeWeights : edge weights / edge indicator seeds : seed must be non empty! [out] labels : resulting nodeLabeling (not necessarily dense)
| void vigra::carvingSegmentation | ( | const GRAPH & | g, |
| const EDGE_WEIGHTS & | edgeWeights, | ||
| const SEEDS & | seeds, | ||
| const typename LABELS::Value | backgroundLabel, | ||
| const typename EDGE_WEIGHTS::Value | backgroundBias, | ||
| const typename EDGE_WEIGHTS::Value | noPriorBelow, | ||
| LABELS & | labels | ||
| ) |
edge weighted watersheds Segmentataion
- Parameters
-
g input graph edgeWeights : edge weights / edge indicator seeds : seed must be non empty! backgroundLabel : which label is background backgroundBias : bias for background noPriorBelow : don't bias the background if edge indicator is below this value [out] labels : resulting nodeLabeling (not necessarily dense)
| void vigra::felzenszwalbSegmentation | ( | const GRAPH & | graph, |
| const EDGE_WEIGHTS & | edgeWeights, | ||
| const NODE_SIZE & | nodeSizes, | ||
| float | k, | ||
| NODE_LABEL_MAP & | nodeLabeling, | ||
| const int | nodeNumStopCond = -1 |
||
| ) |
edge weighted watersheds Segmentataion
- Parameters
-
graph input graph edgeWeights : edge weights / edge indicator nodeSizes : size of each node k : free parameter of felzenszwalb algorithm [out] nodeLabeling : nodeLabeling (not necessarily dense) nodeNumStopCond : optional stopping condition
| void vigra::graphSmoothing | ( | const GRAPH & | g, |
| const NODE_FEATURES_IN & | nodeFeaturesIn, | ||
| const EDGE_INDICATOR & | edgeIndicator, | ||
| const float | lambda, | ||
| const float | edgeThreshold, | ||
| const float | scale, | ||
| NODE_FEATURES_OUT & | nodeFeaturesOut | ||
| ) |
smooth node features of a graph
- Parameters
-
g : input graph nodeFeaturesIn : input node features which should be smoothed edgeIndicator : edge indicator to indicate over which edges one should smooth lambda : scale edge indicator by lambda before taking negative exponent edgeThreshold : edge threshold scale : how much smoothing should be applied [out] nodeFeaturesOut : smoothed node features
| void vigra::recursiveGraphSmoothing | ( | const GRAPH & | g, |
| const NODE_FEATURES_IN & | nodeFeaturesIn, | ||
| const EDGE_INDICATOR & | edgeIndicator, | ||
| const float | lambda, | ||
| const float | edgeThreshold, | ||
| const float | scale, | ||
| size_t | iterations, | ||
| NODE_FEATURES_OUT & | nodeFeaturesBuffer, | ||
| NODE_FEATURES_OUT & | nodeFeaturesOut | ||
| ) |
smooth node features of a graph
- Parameters
-
g : input graph nodeFeaturesIn : input node features which should be smoothed edgeIndicator : edge indicator to indicate over which edges one should smooth lambda : scale edge indicator by lambda before taking negative exponent edgeThreshold : edge threshold scale : how much smoothing should be applied iterations : how often should this algorithm be called recursively [out] nodeFeaturesBuffer : preallocated(!) buffer to store node features temp. [out] nodeFeaturesOut : smoothed node features
| void vigra::projectGroundTruth | ( | const RAG & | rag, |
| const BASE_GRAPH & | baseGraph, | ||
| const BASE_GRAPH_RAG_LABELS & | baseGraphRagLabels, | ||
| const BASE_GRAPH_GT & | baseGraphGt, | ||
| RAG_GT & | ragGt, | ||
| RAG_GT_QT & | |||
| ) |
project ground truth from a base graph, to a region adjacency graph.
| MultiArray<2, MultiArrayIndex> vigra::ragFindEdges | ( | const RAGGRAPH & | rag, |
| const GRAPH & | graph, | ||
| const RAGEDGES & | affiliatedEdges, | ||
| MultiArrayView< N, T > | labelsArray, | ||
| const typename RAGGRAPH::Node & | node | ||
| ) |
Find indices of points on the edges.
- Parameters
-
rag : Region adjacency graph of the labels array graph : Graph of labels array affiliatedEdges : The affiliated edges of the region adjacency graph labelsArray : The label image node : The node (of the region adjacency graph), whose edges shall be found
| void vigra::edgeWeightsFromNodeWeights | ( | const GridGraph< N, DirectedTag > & | g, |
| const NODEMAP & | nodeWeights, | ||
| EDGEMAP & | edgeWeights, | ||
| bool | euclidean, | ||
| FUNCTOR const & | func | ||
| ) |
create edge weights from node weights
- Parameters
-
g : input graph nodeWeights : node property map holding node weights [out] edgeWeights : resulting edge weights euclidean : if 'true', multiply the computed weights with the Euclidean distance between the edge's end nodes (default: 'false') func : binary function that computes the edge weight from the weights of the edge's end nodes (default: take the average)
| void vigra::edgeWeightsFromInterpolatedImage | ( | const GridGraph< N, DirectedTag > & | g, |
| const MultiArrayView< N, T > & | interpolatedImage, | ||
| EDGEMAP & | edgeWeights, | ||
| bool | euclidean = false |
||
| ) |
create edge weights from an interpolated image
- Parameters
-
g : input graph interpolatedImage : interpolated image [out] edgeWeights : edge weights euclidean : if 'true', multiply the weights with the Euclidean distance between the edge's end nodes (default: 'false')
For each edge, the function reads the weight from interpolatedImage[u+v], where u and v are the coordinates of the edge's end points.
| void vigra::hierarchicalClustering | ( | ... | ) |
Reduce the number of nodes in a graph by iteratively contracting the cheapest edge.
Declarations:
Hierarchical clustering is a simple and versatile image segmentation algorithm that typically operates either directly on the pixels (e.g. on a vigra::GridGraph) or on a region adjacency graph over suitable superpixels (e.g. on an vigra::AdjacencyListGraph). The graph is passed to the function in its first argument. After clustering is completed, the parameter labelMap contains a mapping from original node IDs to the ID of the cluster each node belongs to. Cluster IDs correspond to the ID of an arbitrarily chosen representative node within each cluster, i.e. they form a sparse subset of the original IDs.
Properties of the graph's edges and nodes are provided in the property maps edgeWeights, edgeLengths, nodeFeatures, and nodeSizes. These maps are indexed by edge or node ID and return the corresponding feature. Features must by arithmetic scalars or, in case of node features, scalars or vectors of scalars (precisely: objects that provide begin() and end() to create an STL range). Edge weights are typically derived from an edge indicator such as the gradient magnitude, and node features are either the responses of a filter family (when clustering on the pixel grid), or region statistics as computed by Feature Accumulators (when clustering on superpixels).
In each step, the algorithm merges the two nodes  and
and  whose cluster distance is smallest, where the cluster distance is defined as
whose cluster distance is smallest, where the cluster distance is defined as
![\[ d_{uv} = \left( (1-\beta) w_{uv} + \beta || f_u - f_v ||_M \right) \cdot \frac{2}{s_u^{-\omega} + s_v^{-\omega}} \]](form_149.png)
with  denoting the weight of edge
denoting the weight of edge  ,
,  and
and  being the node features (possibly vectors to be compared with metric
being the node features (possibly vectors to be compared with metric  ), and
), and  and
and  the corresponding node sizes. The metric is defined in the option object by calling vigra::ClusteringOptions::nodeFeatureMetric() and must be selected from the tags defined in vigra::metrics::MetricType.
the corresponding node sizes. The metric is defined in the option object by calling vigra::ClusteringOptions::nodeFeatureMetric() and must be selected from the tags defined in vigra::metrics::MetricType.
The parameters  and
and  control the relative influence of the inputs: With
control the relative influence of the inputs: With  , the node features are ignored, whereas with
, the node features are ignored, whereas with  the edge weights are ignored. Similarly, with
the edge weights are ignored. Similarly, with  , the node size is ignored, whereas with
, the node size is ignored, whereas with  , cluster distances are scaled by the harmonic mean of the cluster sizes, making the merging of small clusters more favorable. The parameters are defined in the option object by calling vigra::ClusteringOptions::nodeFeatureImportance() and vigra::ClusteringOptions::sizeImportance() respectively.
, cluster distances are scaled by the harmonic mean of the cluster sizes, making the merging of small clusters more favorable. The parameters are defined in the option object by calling vigra::ClusteringOptions::nodeFeatureImportance() and vigra::ClusteringOptions::sizeImportance() respectively.
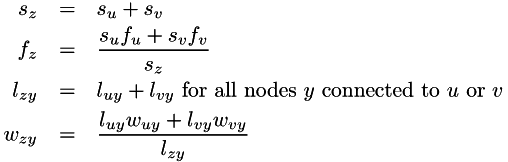
After each merging step, the features of the resulting cluster  and the weights of its outgoing edges are updated by mean of the corresponding properties of the original clusters and , weighted by the respective node sizes
and the weights of its outgoing edges are updated by mean of the corresponding properties of the original clusters and , weighted by the respective node sizes  and edge lengths
and edge lengths  :
:
Clustering normally stops when only one cluster remains. This default can be overridden by the option object parameters vigra::ClusteringOptions::minRegionCount() and vigra::ClusteringOptions::maxMergeDistance() to stop at a particular number of clusters or a particular cluster distance respectively.
Usage:
#include <vigra/hierarchical_clustering.hxx>
Namespace: vigra
A fully worked example can be found in graph_agglomerative_clustering.cxx
- Examples:
- graph_agglomerative_clustering.cxx.